无人机硬件接口
标准硬件接口介绍
我们对无人机开放的标准硬件接口、与接口配合的开发者套件进行介绍,提供引脚定义和功能说明。请在熟悉机型硬件接口与关联的配件后,再阅读无人机硬件连接。
| 无人机 | 接口名称 | 适配的开发套件 |
|---|---|---|
| EVO Max 系列 | P-Port 接口 P-Port Lite 接口 | PSDK转接板 SDK 同轴线 |
| Autel Alpha | P-Port 接口 C-Port 接口(可接云台转接环) | 云台转接环 PSDK 转接板 SDK 同轴线 |
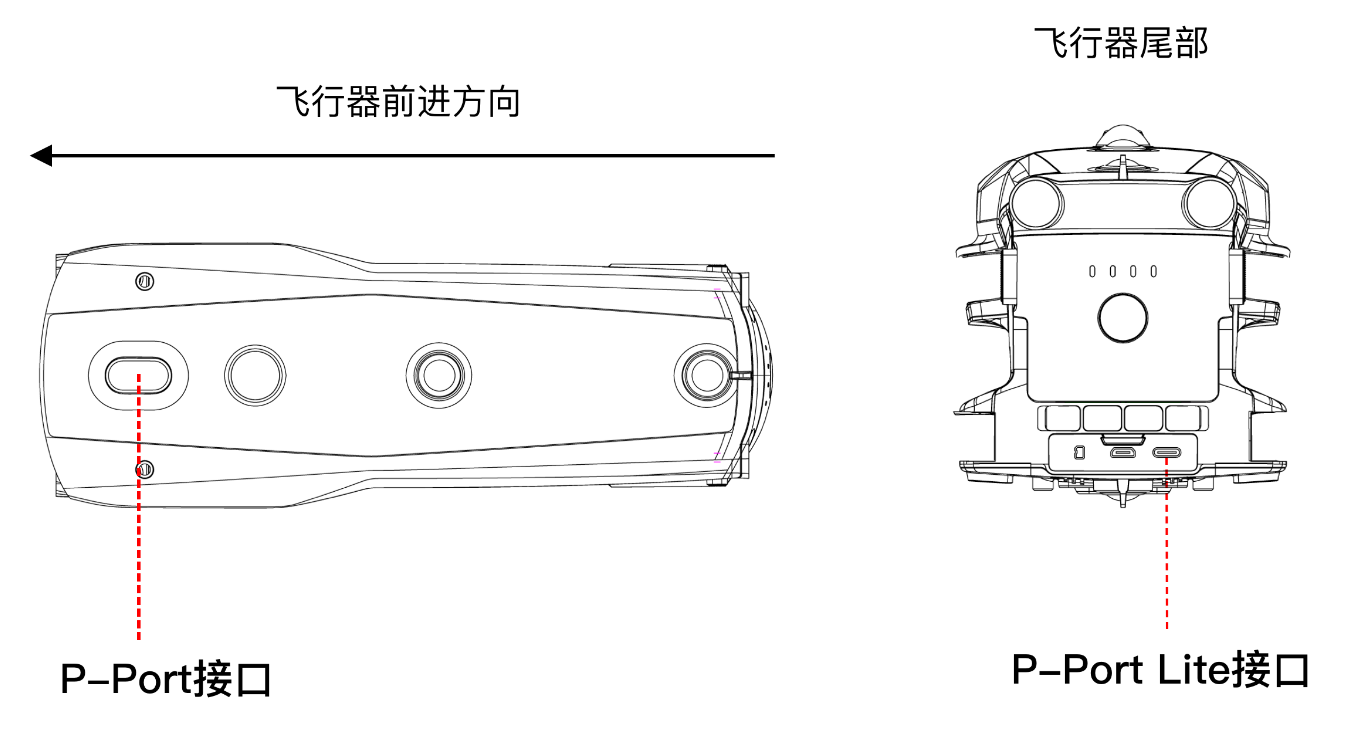
P-Port Lite 接口
EVO Max 系列多旋翼无人机开放 P-Port Lite 接口,此接口位于机身尾部,采用 USB-C 物理接口形式,接口界面尺寸与引脚定义与 USB-C 标准一致。支持通过 USB 2.0 转串口的通信协议,支持 PSDK 的部分软件功能。
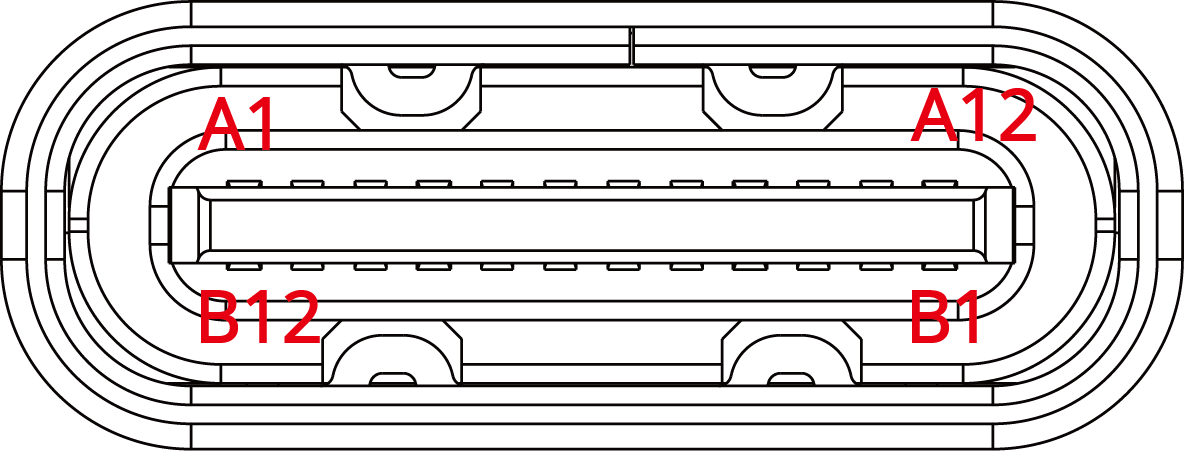
| 编号 | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 接口名称 | GND | TX1+ | TX1- | VBUS | CC1 | D+ | D- | SBU1 | VBUS | RX2- | RX2+ | GND |
| 编号 | B12 | B11 | B10 | B9 | B8 | B7 | B6 | B5 | B4 | B3 | B2 | B1 |
| 接口名称 | GND | RX1+ | RX1- | VBUS | SBU2 | D- | D+ | CC2 | VBUS | TX2- | TX2+ | GND |
说明:
- 如需使用 P-Port Lite 接口,接入负载设备端必须将 CC1 或 CC2 使用 5.1K 电阻下拉到 GND,此时 VBUS 才会有 5V 电压输出(电流限制 500mA)。
- 接入负载设备端必须将 SBU1 和 SBU2 连接到 GND,如需使用 P-Port Lite 的高功率电源,则通过电源管理模块的高功率申请接口将 VBUS 电压提升至 12.8 - 17V,电流提升至 3A。
- 使用 PSDK 时, 只需要用到该接口的 VBUS、GND、D+、D-、CC1、CC2、SBU1 和 SBU2(高功率申请使用)信号,未使用的引脚请务必保持悬空。
- 使用该接口时需要考虑连接器的固定,避免因机身的震动出现接触性不良等问题。
P-Port Lite USB转串口的芯片型号标准
| 芯片型号 | 兼容性 |
|---|---|
| FT232 | 兼容 |
| CP2102 | 兼容 |
P-Port 接口
EVO Max 系列多旋翼无人机开放 P-Port 接口,接口与引脚定义介绍如下:
| 编号 | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 接口名称 | GND | NC | NC | VCC | SYNC_PPS | NC | NC | ON_DET | VCC | NC | NC | GND |
| 编号 | B12 | B11 | B10 | B9 | B8 | B7 | B6 | B5 | B4 | B3 | B2 | B1 |
| 接口名称 | GND | NC | NC | VCC | UART_RX | USB_DM | USB_DP | UART_TX | VCC | NC | NC | GND |
说明:
- 不同机型之间 VCC 供电电压存在差异,设计上请考虑兼容性。
- NC 引脚 为无人机端预留信号引脚,为避免开发或使用中第三方设备损坏无人机端 SDK 接口,请将 NC 引脚悬空,不要与设备端自定义接口连接。
供电接口
- EVO Max 系列的 VCC 引脚额定电压 12.8 - 17V,电流限制 4A,输出的总功率 51.2 - 68W。
- 该接口的 VCC 引脚在同一网络下,您可根据实际的使用需求连接 VCC 引脚数量。为保证无人机能够持续稳定地输出电流,请同时连接 4 个 VCC 引脚。
- ON_DET 引脚(A8)为无人机的外接 PSDK 负载设备检测引脚,接入 ON_DET 引脚(A8)的对端必须为 GND,请勿串联任何阻值电阻,此时才会有额定电压输出。
数据通信接口
- 如需使用 USB 2.0(usb bulk transfer,后续 OTA 升级支持)或者 Rndis(TCP/IP over USB)的功能,请使用 USB_DP 引脚(B6)和 USB_DM 引脚(B7)。注意无人机作为USB Host,负载设备只能作为 USB Device。
- 如需通过串口,实现用户负载设备和无人机之间的通信,请使用 UART_RX 引脚(B8)和 UART_TX 引脚(B5)。UART_RX 引脚(B8)需连接 PSDK 负载设备的 TX 端,UART_TX 引脚(B5)需连接 PSDK 负载设备的 RX 端。
时间同步接口
- 如需使用飞行器对外输出的同步信号,实现时间同步功能,请使用 SYNC_PPS 引脚(A5)。
C-Port 接口
无人机的 C-Port 仅支持搭配 AUTEL Robotics 官方云台使用,且暂定未开放该接口的引脚定义,但您可以使用云台转接环进行二次开发。云台转接环接口定义如下:
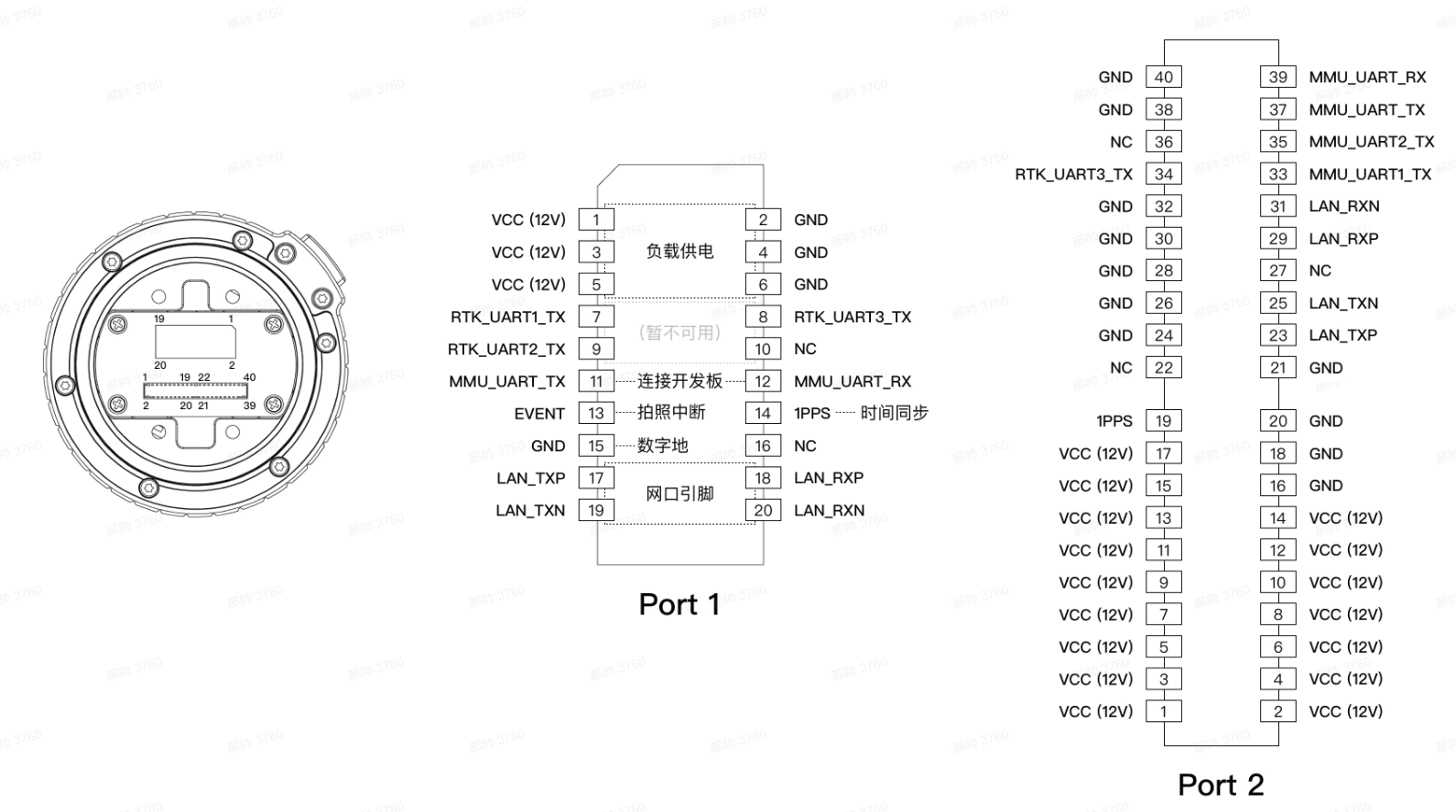
Port1
- 使用云台转接环的供电功能,请使用引脚:1-6
- 为实现使用云台转接环开发的负载设备与 AUTEL Robotics 的无人机通信,必须连接引脚:11 和 12。
- 使用 PSDK 提供的时间同步功能,需要连接 PPS 引脚(14)与具有 RTK 功能的无人机间同步时间。云台转接环同时提供了无人机 RTK 原始输出信号RTK_TX1(引脚 7)、RTK_TX2(引脚 9)、RTK_TX3(引脚 8),方便用户直接使用。触发 RTK Event 的引脚应使用 3.3 伏电压。
- 使用网口高速数据传输功能,需连接引脚 17-20。
Port2
- 使用云台转接环的供电功能,请使用引脚:1-17
- 为实现使用云台转接环开发的负载设备与 AUTEL Robotics 的无人机通信,必须连接引脚:37 和 39
- 使用 PSDK 提供的时间同步功能,需要连接 PPS 引脚(19)与具有 RTK 功能的无人机间同步时间。云台转接环同时提供了无人机 RTK 原始输出信号 RTK_TX1(引脚33)、RTK_TX2(引脚 35)、RTK_TX3(引脚 34),方便用户直接使用。触发 RTK Event 的引脚应使用 3.3 伏电压。
- 使用网口高速数据传输功能,需连接引脚 23、25、29 和 31。
安装负载说明
- 先拆掉盖板上面的 2 颗螺丝,取上盖板;
- 拆下快拆板的 2 颗螺丝;
- .安装转接环:线接好线,再对好限位,使用四颗 M2×6 的螺丝锁定负载设备,负载设备上对应螺纹孔的深度不小于 5 毫米;
- 做好以上步骤,再将快拆板和上盖板装好即可;
PSDK开发者套件
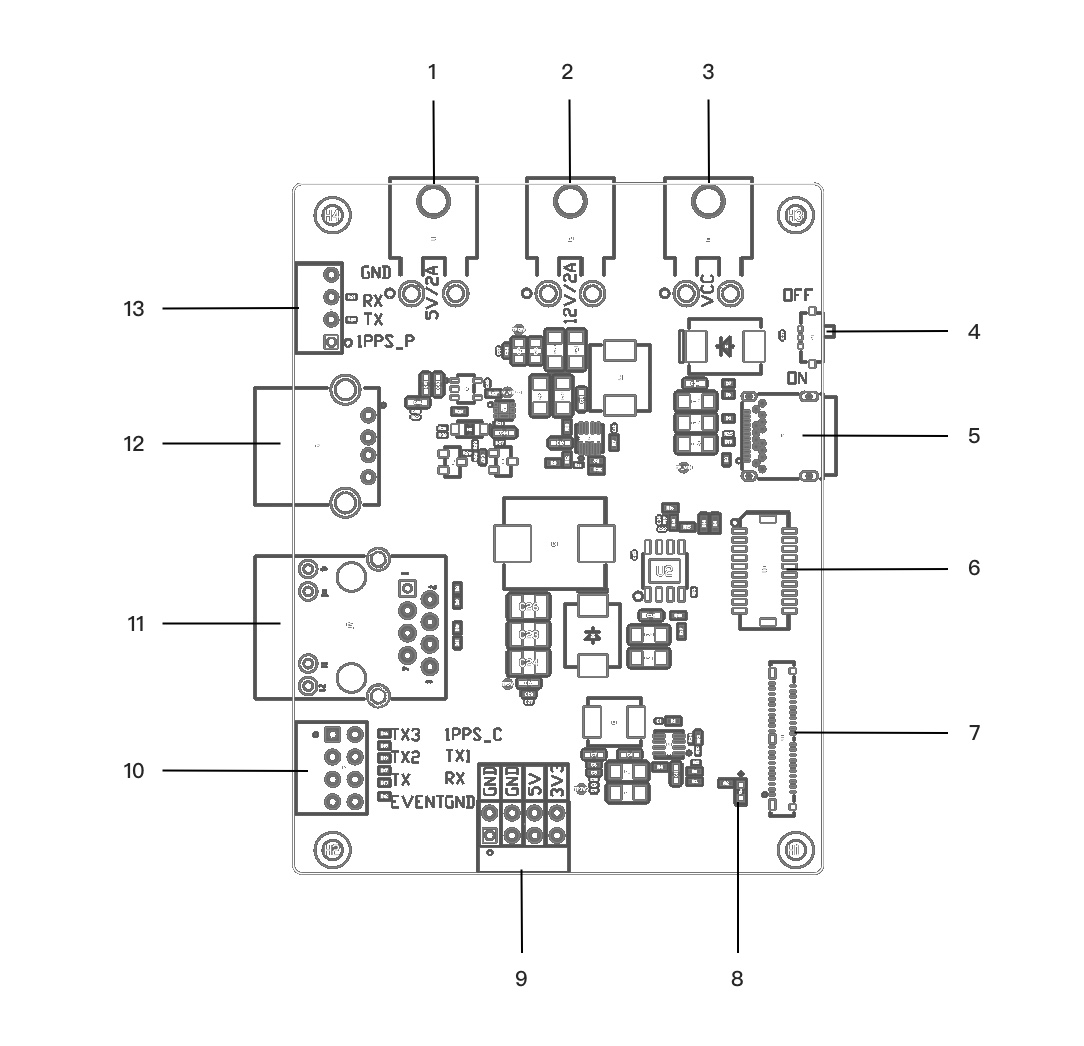
| 序号 | P-Port接口 | 功能 |
|---|---|---|
| 1 | XT30电源输出接口(5V) | 5V/2A 输出 |
| 2 | XT30电源输出接口(12V) | 12V/2A 输出 |
| 3 | XT30电源输出接口(VCC) | 与无人机 P-Port 接口的 VCC 引脚输出功率相同 |
| 4 | P-Port 拨码开关 | P-Port 接口工作开关,切换 OFF,停止对外输出电压 |
| 5 | P-Port/Lite 连接口 | 通过对应同轴线连接到无人机 P-Port 或者 EVO Max 无人机的 P-Port Lite 接口 |
| 6 | 云台转接环端子线输入 | 通过端子线接到无人机云台转接环 |
| 7 | 云台转接环同轴线输入 | 通过同轴线接到无人机云台转接环 |
| 8 | 电源指示灯 | P-Port 拨码开关处理 ON 状态,连接连接 P-Port Lite 或连接到云台转接环,LED 灯点亮 |
| 9 | 排针电源输出 | 两路5V和两路3.3V输出 |
| 10 | 转接环排针信号 | 开发板与转接环连接后引出的引脚,TX/RX/TX1/TX2/TX3/GND 为 UART 引脚。1PPS_C 根据需要连接至机载设备 GPIO 实现时间同步功能。EVENT为机载设备事件触发引脚 |
| 11 | 网口 | 开发板与转接环连接时,记载设备可以通过网口与无人机进行通信 |
| 12 | Type-A 接口 | USB 2.0 接口,连接负载设备的 USB 端口 |
| 13 | P-Port 排针信号 | 开发板与无人机的 P-Port 连接后引出的引脚,TX/RX/GND 为 UART 引脚,分别对应机载设备端 RX/TX/GND |
同轴线



说明
P-port_Alpha 同轴线和 EVO Max P-port 同轴线连接PSDK开发板的一端区分 A/B 面,连接时需要B面向上
无人机接口说明
EVO Max 系列
Autel Alpha 系列
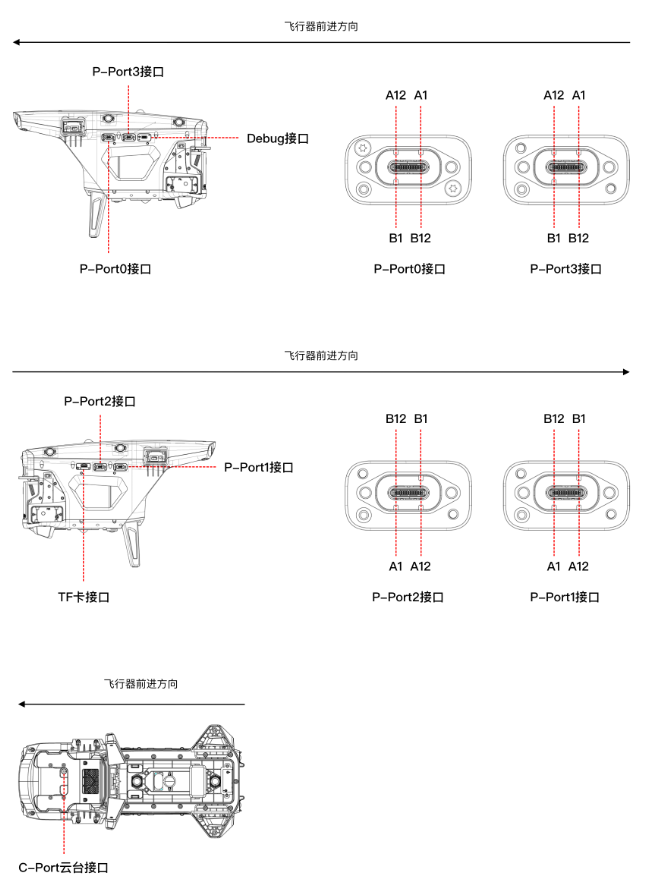
说明:
- Autel Alpha 部分批次 P-Port3 丝印为 OSDK,两个为同一个硬件接口
- Autel Alpha P-Port2 口和 P-Port3 口不可以同时使用USB
- Autel Alpha P-Port3 口不支持硬件串口