使用树莓派开发套件
简介
PSDK 开发者套件用于将无人机的接口转换成多种标准硬件接口,方便开发者进行硬件设备连接和 SDK 开发调试。PSDK 开发者套件支持的无人机机型与适配的机身接口。
本示例将基于 Autel Alpha 无人机、PSDK 开发者套件和 RPI(Raspberry Pi)树莓派 4B 开发者套件,介绍从硬件连接、软件环境配置、获取开发包和编译运行等一系列的开发步骤,帮助您快速上手 Payload SDK (后称 PSDK) 的开发。
硬件环境准备
1. 准备硬件设备
| 硬件 | 个数 | 用途 |
|---|---|---|
| 树莓派 4B 开发套件 | 1 | PSDK 的运行平台 |
| 高清显示器(HDMI 接口) | 1 | 用于开发板 Ubuntu 系统的界面显示 |
| 键盘 + 鼠标 | 1 | 用于开发板 Ubuntu 系统的人机交互 |
| PSDK 开发者套件 | 1 | 提供标准硬件接口 |
| 网线 | 1 | 用于开发板访问网络资源 |
| Autel Alpha 无人机 + 配套产品(遥控器+电池+负载+充电箱) | 1 | 应用开发硬件平台 |
2. 硬件连接
- 准备一台高清显示器、一套键盘鼠标和宽敞的桌面环境。
- 准备一套 Autel Alpha 无人机环境,安装电池后将无人机摆放到桌面上合适的位置。
- 使用同轴线或排线连接云台转接环与 PSDK 转接板。
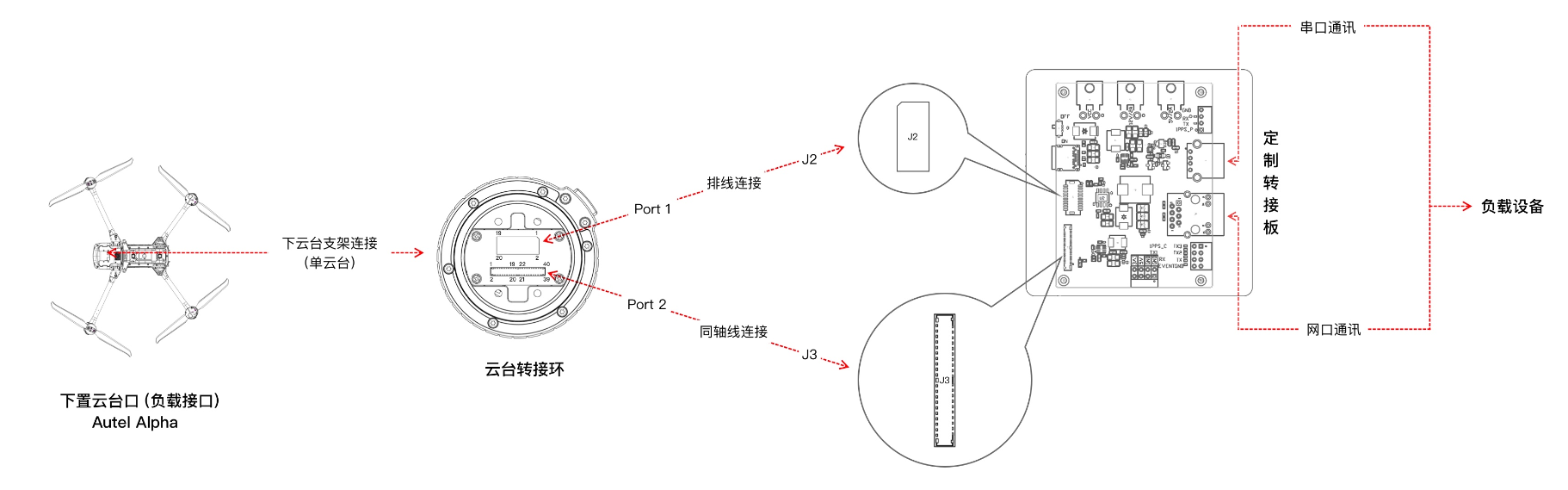
- 使用网线连接PSDK转接板与树莓派开发板。
- 将树莓派开发板接入电源, micro HDMI 显示输出接入到高清显示器,并且接入键盘鼠标到树莓派开发板的 USB 口。
- 进行无人机整机启动,将 PSDK 开发板的电源拨码开关打开,检查电源指示灯是否亮起,若亮起则说明供电正常。
- 观察显示器,确认树莓派开发板是否进入启动页面。
软件环境准备
1. 安装软件环境
树莓派 4B 开发套件默认不包含 SD 卡和 Raspberry Pi OS 64 位系统镜像,请参考树莓派烧录指导 进行镜像烧录和账户配置,建议用户安装支持树莓派 4B 开发套件的 Ubuntu 系统。
完成硬件环境准备并启动完成后,我们首先输入您配置的账号密码,检查是否可以登录进入 Raspberry Pi 桌面系统。
2. 注册 PSDK 开发者账号
您可以在道通智能开发者平台上进行注册,申请成为 PSDK 开发者。
3. 下载 PSDK 软件包
在 PSDK 仓库获取最新的软件开发包,最新代码在 master 分支上。
4. 修改必要的代码
您需要通过开发者用户中心,创建应用后将生成的 PSDK 应用信息,填入前一步获取的 PSDK 软件开发包的指定文件中,否则 PSDK 将无法正常运行。
- example/uav_sdk_app_info.h
#define USER_APP_NAME "your_app_name"
#define USER_APP_ID "your_app_id"
#define USER_APP_KEY "your_app_key"
#define USER_APP_LICENSE "your_app_license"
#define USER_DEVELOPER_ACCOUNT "your_account"
#define USER_BAUDRATE_RATE "460800"
5. 编译与运行
生成对应的 Linux 版本的PSDK软件包,并执行可执行文件。
| 功能 | 文件 | 内容 |
|---|---|---|
| 自定义控件 | custom_widget.cxx | 描述了自定义控件的初始化、设置配置文件路径的方式以及注册回调函数的方式 |
| 低速数据通道 | data_channel.cxx | 描述了低速通道的初始化以及传输数据的方式 |
| 高速数据通道 | high_speed_channel.cxx | 描述了高速通道的初始化以及传输数据的方式 |
| 标准负载云台 | gimbal.cxx | 描述了标准负载云台的初始化、基础功能的测试方法以及回调函数的注册方法 |
| 标准负载相机 | payload_camera.cxx | 描述了标准负载相机的初始化、基础功能的测试方法以及回调函数的注册方法 |
| 精准定位 | positioning.cxx | 描述了精准定位的初始化、时间同步方法以及获取位置信息的方法 |
| 高频消息 | subscribe.cxx | 描述了订阅高频消息的方法 |
| Tracer | tracer_example.cxx | 描述了 Tracer 的初始化以及基础功能注册回调函数的方法 |