任务规划流程及说明
航线飞行(waypoint)是Mobile SDK重要的功能模块。在地图上选定飞行起始点、航线点、飞行终点以及设定飞行任务以后,飞机可以按照指定的地图选定点开。
始执行飞行任务新航线任务支持用户手动选择目标点,通过不同的航线规划算法,自动生成飞行航线。用户可以自定义航线飞行参数以及航点的相机动作。
本教程指导如何通过SDK提供的接口,实现对航线任务的规划、上传、执行、暂停、恢复以及对航线任务执行状态与航线信息的监听等。
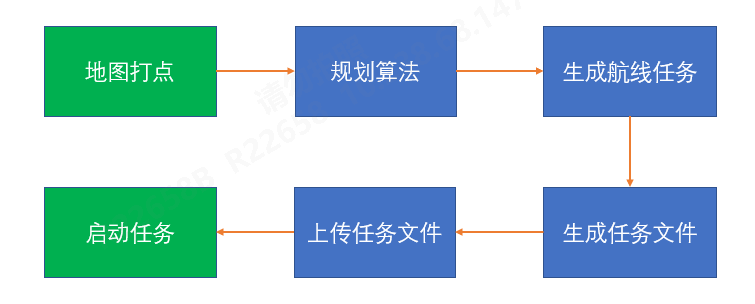
一、任务规划流程
二、规划算法
1. 航点任务算法接口
val result = AlgorithmManager.getInstance().getWaypointPath(pathMission)
1.1 算法入参
public class PathMission {
/** 航点个数*/
public short WPNum;
/** 是否使用默认半径, 0:不用,1:用*/
public short default_R_flag;
/** Home点坐标,经纬高*/
public double[] HomeLLA;//3
/** 航点信息(目前开放500个)*/
public PathPoint[] WP_Info_strc;
public PathMission() {
HomeLLA = new double[3];
WP_Info_strc = new PathPoint[0];
}
}
1.2 算法入参
子参数PathPoint:航点信息
public class PathPoint {
/** 航点类型 1-代表停下的点,2-代表协调转弯*/
public short WPTypeUsr;
/**表示WPType=3的时候,自动协调拐弯的弧线距离相应航点的最远距离 范围大于0,小于100 值默认为2,单位m*/
public float WP2ArcDistUsr;
/** 用户设置的航点,经纬高 */
public double[] WPLLAUsr;//3
/** 用户设置转弯半径*/
public double RadUsr;
/** 速度 */
public double VelRefUsr;
/** 航点高度优先级 1表示优先级比前一个点高,-1表示比前一个点低,0表示无优先级 */
public short AltPrioUsr;
/** 此航点中 动作朝向模式 1表示协调转弯,2表示手动,3表示自定义 */
public short Heading_Mode;
/** 兴趣点是否有效 -1 表示无兴趣点, 1 表示有兴趣点 */
public short POI_Valid;
/** 对应兴趣点的坐标,经纬高 */
public double[] POIUsr;//3
/** 航点的应急动作类型 0 为无动作,1 为悬停,2 为降落,3 为返航*/
public short EmgActUsr = 3;
/** 此航点相机动作总数 */
public short ActionNum;
/** 航点动作(10个)实际Action_Num个,最大为10 */
public CameraActionJNI[] MSN_ActionInfo;//10
}
1.3 算法入参
子参数CameraActionJNI: 相机动作
public class CameraActionJNI {
/** 动作类型 */
public int Action_Type;
/** 云台Pitch角 */
public float Gimbal_Pitch;
/** 云台Roll角 */
public float Gimbal_Roll;
/** 偏航角度 */
public float Action_Yaw_Ref;
/** 定时拍照间隔(s) */
public int Shoot_Time_Interval;
/** 定距拍照距离间隔(mm) */
public float Shoot_Dis_Interval;
/** 动作执行时长(s) */
public int Action_Time;
/** 变焦倍数 */
public int Zoom_Rate;
/** 预留 */
public int[] reserved;//2
}
1.4 算法出参
public class PathResultMission {
/** 总飞行时间 */
public float T_ttl_fly;
/** 总飞行路程 */
public float L_ttl_fly;
/** 总照片张数 */
public int Photo_Num;
/** 面积,航点任务没有 */
public double area;
/** 航线个数 */
public short FPNum;
/** 绘图点个数 */
public int Pts4PlotNum;
/** 无人机机头朝向*/
public float UAVHeading;
/** 所有绘图点坐标展开(Pts4PlotNum个经度,Pts4PlotNum个维度,Pts4PlotNum个高度,剩下的为0 有效数值为前3*Pts4PlotNum个 */
public double[] Pts4PlotLLA;//141030
/** 箭头个数 **/
public int ArrowNum;
/** 箭头纬经高和方向(以正东为x轴,正南为y,向下为z)。所有箭头点坐标展开(ArrowNum个纬度,ArrowNum个经度,ArrowNum个高度,ArrowNum个箭头方向,有效数值为前4*ArrowNum个**/
public double[] ArrowPosDirLLA;
/** 航点处可设置的最大半径 **/
public float[] R_max;
/* 航线信息(1000个)有效点为FPNum个 */
public PathResultLine[] FP_Info_strc;//1010
/**
* 算法调用返回的航线错误码
* //0-normal,1-相邻航点间距离超过10公里,2-相邻航点间高度差超过1公里,3-包含1和2的错误总和
*/
public short errorCode;
}
1.5 算法出参(子参数:PathResultLine航点任务中的一条航线)
public class PathResultLine {
/** 航点类型 1代表停下的点,2代表协调转弯 */
public short WPTypeExe;
/** 起点坐标,经纬高 */
public double[] WPPrevLLAExe;//3
/** 终点坐标,经纬高 */
public double[] WPCurrLLAExe;//3
/** 圆心坐标,经纬高 */
public double[] WPCentLLAExe;//3
/** 航点速度 */
public float VelRef_FP;
/** 下个航点速度 */
public float VelRefNxt_FP;
/** 航点高度优先级 1 代表当前最高,0 代表等优先级,-1 代表当前最低*/
public short AltPrio_FP;
/** 航线长度 */
public float FP_length;
/** 航线预计飞行时间 */
public float T_curr;
/** 此航点中动作朝向模式 1表示协调转弯,2表示手动,3表示自定义 */
public short Heading_Mode_FP;
/** 兴趣点是否有效 -1 表示无兴趣点, 1 表示有兴趣点 */
public short POI_Valid_FP;
/** 对应兴趣点的坐标,经纬高 */
public double[] POI_FP;//3
/** 此航点动作总数 */
public short ActionNum_FP;
/* 每个航段的首航点的应急动作类型。0 为无动作,1 为悬停,2 为降落,3 为返航*/
public short EmgAct_FP;
/**是否有航段动作*/
public short ActExist;
/** 航点动作(11个)实际ActionNum_FP+1个,最后一个是下一个航点的第一个动作 */
public PathResultCameraAction[] MSN_ActionInfo;//11
}
1.6 算法出参(子参数:PathResultCameraAction相机动作)
public class PathResultCameraAction {
/** 动作类型 */
public float Action_Type;
/** 云台Pitch角 */
public float Gimbal_Pitch;
/** 云台Roll角 */
public float Gimbal_Roll;
/** 偏航角指令 */
public float Action_Yaw_Ref;
/** 定时拍照间隔 */
public float Shoot_Time_Interval;
/** 定距拍照距离间隔 */
public float Shoot_Dis_Interval;
/** 动作执行时长 */
public float Action_Time;
/** 变焦倍数 */
public float Zoom_Rate;
/** 预留 */
public float[] reserved;
}
三、任务文件生成
航线任务算法出来的结果最终要转换成任务文件,上传给飞机执行;即 PathResultMission->MissionInfoJNI
任务文件结构(MissionInfoJNI)
public class MissionInfoJNI {
/** 任务Index */
public int Mission_ID;
/*** 相对高度or海拔高度(m) */
public int Altitude_type;
/** 任务类型 */
public int Mission_type;
/** 任务完成后执行动作 1悬停 2返航 3降落 */
public int Finish_Action;
/** 图传断联后执行动作 */
public int RC_Lost_Action;
/** 最小绕障距离 单位cm*/
public int Min_OA_Dist;
/** 航点个数 */
public int Waypoint_Num;
/** 避障模式 */
public int Obstacle_Mode;
/** 测绘是否开启双网格 */
public int Gride_Enable_Mapping;
/** 相机视场角 degree */
public float VFOV_Mapping;
/** 测绘航向角度 degree */
public float Yaw_Ref_Mapping;
/** 航向重叠率 */
public int Overlap_Mapping;
/** 测绘云台俯仰角度 degree */
public float Gimbal_Pitch_Mapping;
/** 任务总时长(0.01s) */
public int Mission_Time;
/** 任务总路程(0.01m) */
public int Mission_Length;
/** 对应航点信息 * 500 **/
public WaypointInfoJNI[] Waypoints;
/** 预留:0:高程优化标志位;1:和航向垂直于航线参数 */
public int[] reserved;//2
/** 航线相机动作 */
public CameraActionJNI Action_Default ;
/** 任务唯一ID: 每次上传任务时生成,任务启动依赖此Id作为参数 */
public long GUID;
}
四、任务上传
初始化任务文件保存目录:
//初始化Mission文件保存目录:app私有目录
FileConstants.init(this)
上传任务:
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().uploadMissionFile(
missionInfoJNI: MissionInfoJNI,
callback: CommonCallbacks.CompletionCallbackWithProgressAndParam<Long> )
五、启动任务
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().startMission(
guid: MissionWaypointGUIDBean,callback:CommonCallbacks.CompletionCallbackWithParam<Void>)
六、暂停任务
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().pauseMission(
callback : CommonCallbacks.CompletionCallbackWithParam<Void>)
七、恢复任务
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().resumeMission(
guid: MissionWaypointGUIDBean,
callback: CommonCallbacks.CompletionCallbackWithParam<Void>)
八、停止任务
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().exitMission(
callback: CommonCallbacks.CompletionCallbackWithParam<Void>)
九、监听任务状态
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().addWaypointMissionExecuteStateListener(
listener: CommonCallbacks.KeyListener<MissionWaypointStatusReportNtfyBean>)
十、取消任务状态监听
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().removeWaypointMissionExecuteStateListener(
listener: CommonCallbacks.KeyListener<MissionWaypointStatusReportNtfyBean>)
十一、查询断点任务信息
DeviceManager.getDeviceManager().getFirstDroneDevice()?.getWayPointMissionManager().queryMissionBreakpointInfo(
param: MissionWaypointGUIDBean,
callback: CommonCallbacks.CompletionCallbackWithParam<MissionWaypointBreakRspBean>)