什么是 PSDK
为方便您使用 PSDK 提供的新功能开发出安全可靠的负载设备,请持续关注 Autel Robotics 的版本发布信息,及时使用最新版本的 PSDK开发包开发负载设备。
本文所指:
- “移动端 App” 为使用 MSDK 开发的移动端 App 或 Autel Enterprise。
- “负载设备”为使用 PSDK 开发的负载设备。
PSDK 介绍
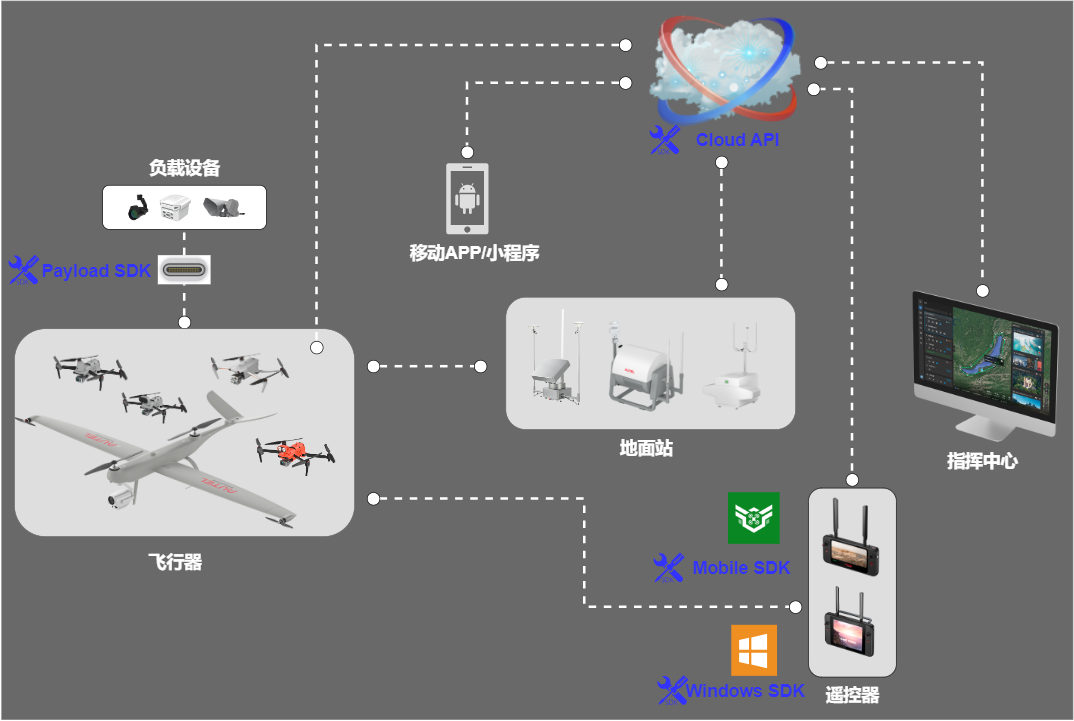
Autel Robotics 为支持开发者开发出可挂载在 Autel Robotics 无人机上的负载设备,提供了开发工具包 Payload SDK(即 PSDK)以及开发配件标准云台、转接环和 SDK 同轴线等,方便开发者利用 Autel Robotics 无人机上如电源、通讯链路及状态信息等资源。开发者能够根据行业的应用需求,基于 PSDK 提供的功能接口,结合具体的结构设计、硬件设计、软件逻辑实现和算法优化,开发出如自动巡检系统、红外相机、喊话器、探照灯等满足不同细分领域的负载设备,并进一步结合 MSDK、Cloud API 构建完整的应用场景解决方案。
主要优势
- 功能丰富且完善
通过使用 PSDK 提供的如信息获取、数据传输和电源管理等基础功能,以及相机、云台、负载协同等高级功能,开发者能够根据行业的应用需求,设计出功能完善的负载设备。并且 PSDK 提供了丰富的接口,方便开发者使用第三方应用程序和算法框架,使用图像识别、自主巡航及 SLAM 等技术开发出专业的应用软件,此外,还方便开发者接入第三方传感器、相机或检测设备,采集所需的数据信息,满足用户个性化的应用功能和控制需求。 - 拓展应用自定义
开发者除使用 Autel Enterprise 控制基于 PSDK 开发的负载设备和控制无人机和负载设备自动执行任务的控制程序外,通过使用 Mobile SDK 也能开发出控制负载设备执行指定动作的移动端 App,使用 Windows SDK 还能够开发出数据处理软件,此外,开发者还能将所开发的软件集成为一套功能完整的解决方案,满足第三方用户丰富的使用需求。 - 兼容广泛的软硬件平台
使用 PSDK 开发的应用程序能够运行在主流的嵌入式硬件平台上,如 HC32、STM32 等,也可运行在主流的嵌入式操作系统和软件架构中,如 Linux、ROS 及 RTOS,开发者按照跨平台移植中的步骤执行所需的工作后,即可在不同版本的软硬件平台上运行基于 PSDK 开发的应用程序。 - 支持服务有保障
PSDK 不仅提供了用于开发 Autel Robotics 无人机负载设备的 API 接口和硬件平台,还提供了开发负载设备的设计标准,此外,还提供了包括但不限于技术支持、负载检测及市场推广等服务,服务开发者使用 PSDK 开发出功能完善的无人机负载设备,探索行业应用的无限潜能。
负载应用
使用 PSDK 开发可挂载在 Autel Robotics 无人机上的负载设备,能够满足不同行业多样化的应用需求:
| 负载设备 | 安防 | 巡检 | 测绘 | 更多行业 | |||
| 治安管理 | 边防缉私 | 管网巡检 | 厂区巡检 | 工程测绘 | 空间规划 | … | |
| 可变焦相机 | √ | √ | √ | √ | √ | √ | … |
| 热成像相机 | √ | √ | √ | √ | - | - | … |
| 红外相机 | √ | √ | - | √ | - | - | … |
| 喊话器 | √ | - | √ | - | - | - | … |
| 探照灯 | √ | - | - | - | - | - | … |
| 激光雷达 | - | √ | √ | - | √ | √ | … |
| 气体检测仪 | - | - | √ | √ | - | - | … |
| 自动巡检系统 | - | √ | √ | √ | - | - | … |
| 更多负载 | … | … | … | … | … | … | … |
使用MSDK
MSDK:使用 MSDK 开发的移动端 App 能够控制负载设备执行指定的动作和任务,详情请参考开发者网站 MSDK 相关介绍页面。
免责声明
在使用 PSDK 开发的应用程序前,请先查阅飞行地所在区域的法律和规定,因使用 PSDK 而引发的安全问题或法律纠纷均与 Autel Robotics 无关,Autel Robotics 不承担一切因使用 PSDK 而导致的任何法律风险和责任。